MicroPythonでEV3を動かしてみよう!
022年4月5日に書いた記事「EV3をPythonでプログラミング~環境構築」にて、EV3をMicroPythonでプログラミングするための準備を紹介しました。見てくれている方が思いのほか多いようですので、今回は実際にMicropythonでEv3を動かしてみましょう
これまでEV3ソフトウェアでプログラミングを作っていて、はじめてテキスト言語(MicroPython)でプログラミングしてみる方を対象に書いています。
千葉市の小中学生向けロボットプロ…


EV3をPythonでプログラミング~環境構築編 | 千葉市の小中学生向けロボットプログラミング教室「テディス」
EV3×Pythonでロボット制御をレベルアップ!Scratchだけでなく本格的なテキストプログラミングに挑戦したい小中学生におすすめの学習方法をご紹介します。
千葉市の小中学生向けロボットプロ…

MicroPythonでEV3のタッチセンサーを使ってみよう! | 千葉市の小中学生向けロボットプログラミング教室「…
EV3のタッチセンサーをMicroPythonで制御する方法を、初心者にもわかりやすく解説。プログラミング教材や授業での活用にも最適な内容です。
目次
プロジェクトの作成
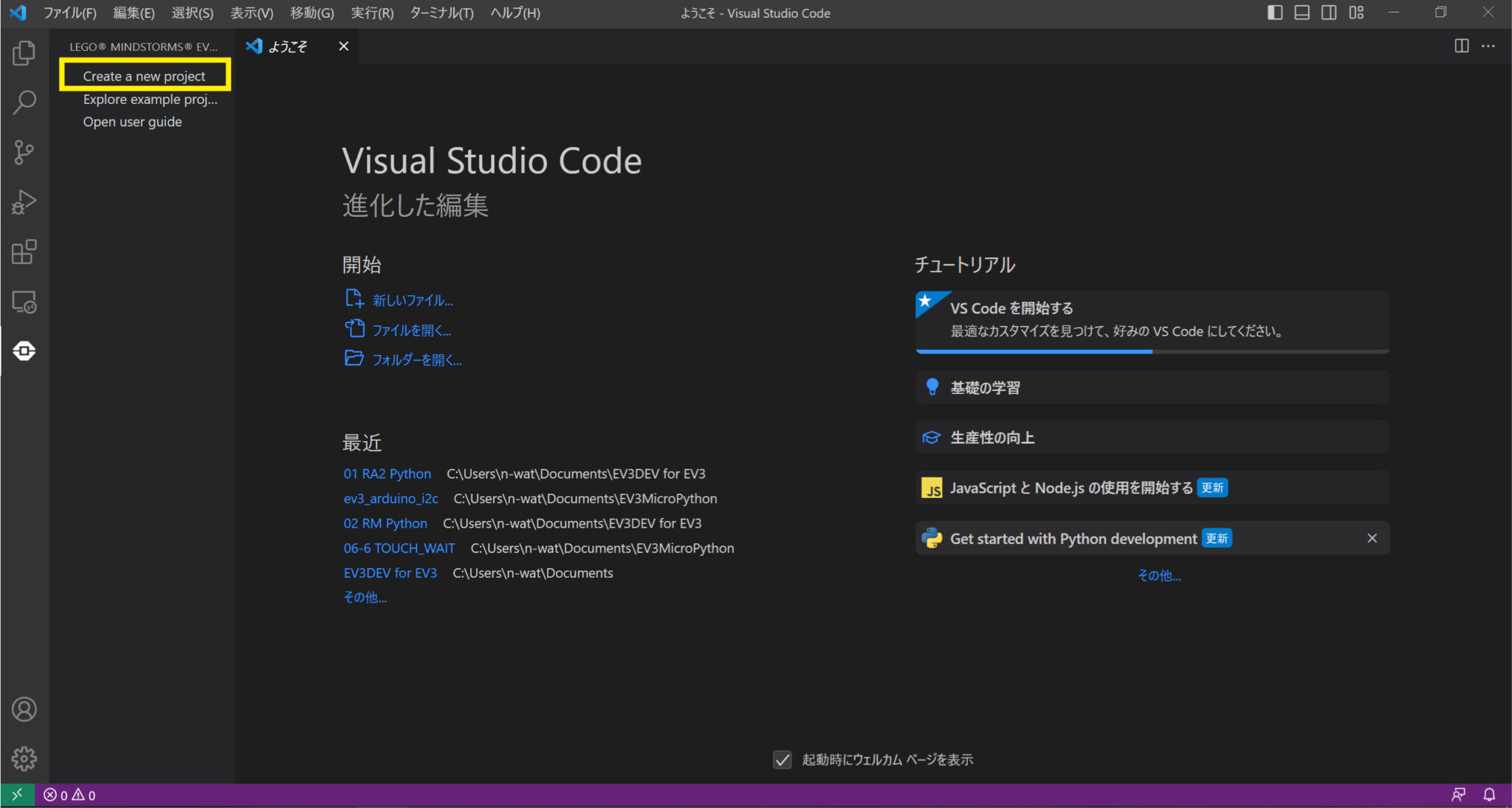
Visual Studio Code(VS Code)を起動して、以下の手順でプロジェクトを新規作成します。
- 左のメニューの「EV3 MicroPython」のアイコンを選択し、「Create a new project」をクリックする。
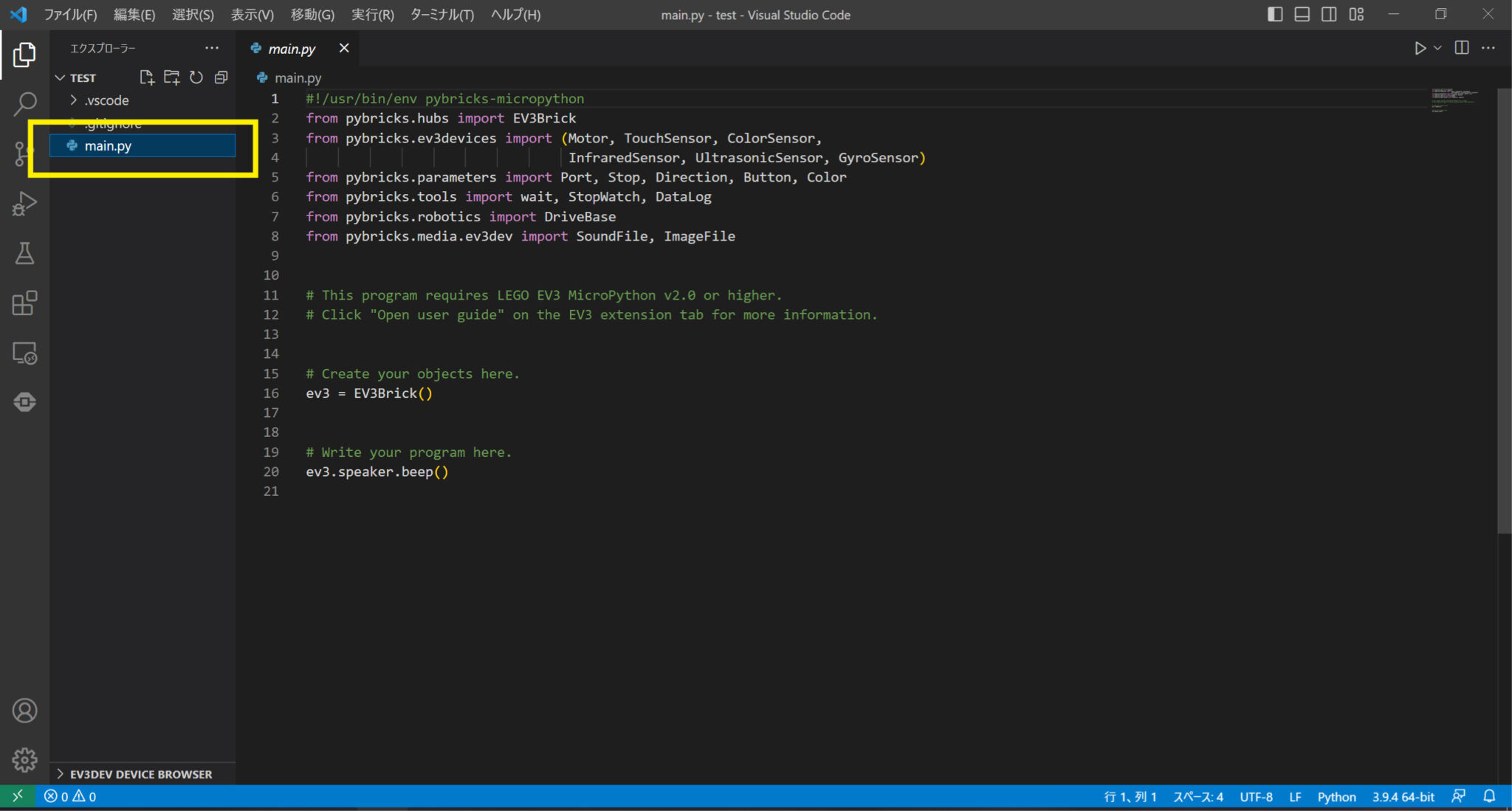
- プロジェクト名入力し(英数半角文字のみ使用可能)、保存するフォルダーを選択する(フォルダーの新規作成で先に入力したプロジェクト名のフォルダを作成)。
- 新規プロジェクトが作成されてmain.pyファイルが自動で作成される。

ロボットを「3秒間、まっすぐ前進」させてみよう!
「3秒間、まっすぐ前進」プログラムを「EV3ソフトウェア(ビジュアルプログラミング)」と「Micro Python(テキストプログラミング)」で、それぞれ作ってみましょう。移動のスピードは問いませんが、ロボットの左側モーターはポートB、右側モーターをはートCに接続しているものとします。
EV3ソフトウェア
EV3ソフトウェアでは、タンクまたはステアリングを使って、以下のようにプログラミングすることができます(プログラム例ではタンクを使用)。簡単ですね。

Micro Python
今度は、同じ動作のプログラムをMicroPythonで作ってみましょう。
#!/usr/bin/env pybricks-micropython
from pybricks.ev3devices import Motor
from pybricks.parameters import Port
from pybricks.tools import wait
motor_left = Motor(Port.B)
motor_right = Motor(Port.C)
motor_left.run(360)
motor_right.run(360)
wait(3000)
motor_left.stop()
motor_right.stop()1行目
Shebang(シバンまたはシェバン)と呼ばれ、Unix系システムにおいて、ファイルに書かれたプログラム文をどうやって実行するかを指定しています。EV3 MicroPythonではこれがないと動きませんので、必ず記述しましょう。
2~4行目
必要なモジュール(関数や」クラスなどをまとめたもの)をインポートします。
6~7行目
モーターを出力ポートBに接続し、それをプログラムの中で「motor_left」という名前で扱うことを記述しています。同様にもう一つのモーターをポートCに接続し、「motor_rightという真苗で扱うことを記述しています。
9~10行目
「run(360)」でモーターを回転させています。( )内の数値は角速度(度/秒)です。
11行目
「wait(3000)」でプログラムを停止させています。( )内の停止させる時間(ミリ秒)です。この間、モーターは動き続けます。
12~13行目
「stop()」でモーターを停止させています。
※ 「stop()」は「ブレーキなし」ですので、モーターは惰性で回転を続けます。「ブレーキあり」としたい場合は「stop()」を「brake()」に変えてください。
まとめ
今回は、MocroPythonでEV3のモーターを動かしてみました。EV3センサーを扱えるのはもちろん、その他サードパーティ製センサーもリファレンスの対応センサ一覧にあるものは使用可能です。また、各種I2Cデバイス等も使用できますので、EV3ソフトウェアからMicroPythonを使ったプログラミングへ移行し、テキスト言語に挑戦してみましょう。