アフターEV3のロボット・プログラミング教材
EV3販売終了!次世代ロボットプログラミング教材はどうなる?
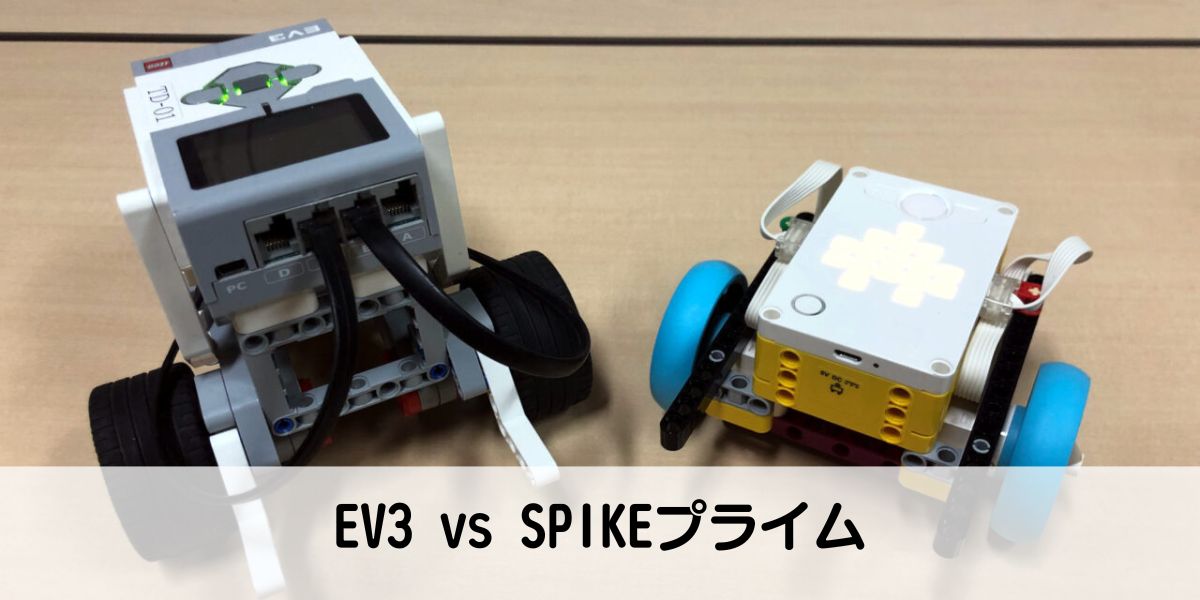
テディスのロボット・サイエンスコースでは、これまでレゴマインドストームEV3をメイン教材として使用してきましたが、EV3は2021年7月をもって販売終了となりました。レゴエデュケーションでは、今後は「SPIKEプライム」へ統合する方針を発表しています。
本記事では、SPIKEプライムがEV3の後継教材として適しているのか、ロボカップジュニア・レスキュー競技に対応できるのか、また他のロボットプログラミング教材の可能性についても検証していきます。
SPIKEプライムはEV3の完全な後継になれるか?
EV3とSPIKEプライムの大きな違いは、拡張性や対象年齢を意識した設計にあります。
- コンパクトな本体と設計自由度:SPIKEプライムのラージハブは軽量でコンパクト。ジャイロセンサーも内蔵され、設計の自由度は高まっています。
- 入出力ポートの少なさが課題:移動・操作用モーターやセンサーを使用すると、6ポートがすぐ埋まってしまいます。Arduinoなどとの接続例も少なく、将来的な拡張性に不安が残ります。
- 液晶画面の廃止とカラフルなデザイン:EV3にあった液晶ディスプレイが5×5のLEDに変更され、ブロックもカラフルに。低学年を意識した設計と見られます。
| EV3 | SPIKEプライム | |
|---|---|---|
| システム | ARM9 300MHz | 100MHz M4 320 KB RAM |
| OS | Linux | MicroPython |
| 入出力ポート | 入力x4、出力x4 | 入出力x6 |
| センサー | タッチ、カラー、超音波、 3軸ジャイロ | 6軸ジャイロ (3軸加速度+3軸ジャイロ) |
| 大きさ | 75W X 115D X 45H(mm) | 56W x 88D x 32H(mm) |
| 重さ | 210g | 148g(バッテリー取付時) |
モーター性能の比較とロボカップ対応性
SPIKEプライムでは、駆動用にMモーターが2つ、Lアンギュラーモーターが1つ搭載されています。しかし、レスキュー競技に必要なトルクを考えると、Lモーターの追加が前提となるでしょう。
特に坂道やバンプをクリアするには、駆動力の検証が必要です。なお、アンギュラーモーターは絶対位置が取得できるため、アーム制御には優れた性能を発揮します。
| EV3 | SPIKEプライム | |
|---|---|---|
| トルク | 21Ncm | 8Ncm |
| 回転数 | 160-170RPM | 135RPM |
センサー構成と実践での使用感
| EV3 | SPIKEプライム | |
| センサー類 | タッチセンサーx2 カラーセンサーx1 超音波センサーx1 ジャイロセンサー(3軸)x1 | フォース(タッチ)センサーx1 カラーセンサーx1 距離(超音波)センサーx1 ラージハブ内蔵ジャイロセンサー(3軸加速度+3軸ジャイロ) |
PIKEプライムのセンサー構成は基本的にEV3と同等ですが、以下の点が気になります。
- カラーセンサーのLEDが非常に明るく、白銀の識別精度に懸念
- フォースセンサーの反応が鈍く、壁トレースに不向きかも
- ケーブル一体型で、破損時の交換コストが高い可能性
EV3のようにケーブルとデバイスが分離していた方が、保守性は高いと感じます。
レゴ以外のロボットプログラミング教材は代替となるか?
レゴ以外にもさまざまな教材がありますが、以下の条件をすべて満たすものは現時点では少数です。
- ビジュアルプログラミング対応
- ロボカップレベルの機能性
- 教育現場での導入実績
- センサーやモーターの拡張性
2年以内にSPIKEプライムの周辺機器やサードパーティ製品が充実することが期待されますが、現状のままでは、テディスの上級コース(3年目以降)での使用は慎重に判断する必要があります。場合によっては、自作センサーの導入も視野に入れています。